またまた前回(の前半部分)の続きから、です。
O,O’の座標の求め方はさくっと流して、残るはP,P’の座標(緯度、経度、標高)は具体的にどうやって求めるの?というところになりました。
さて、第4回のおさらいですが

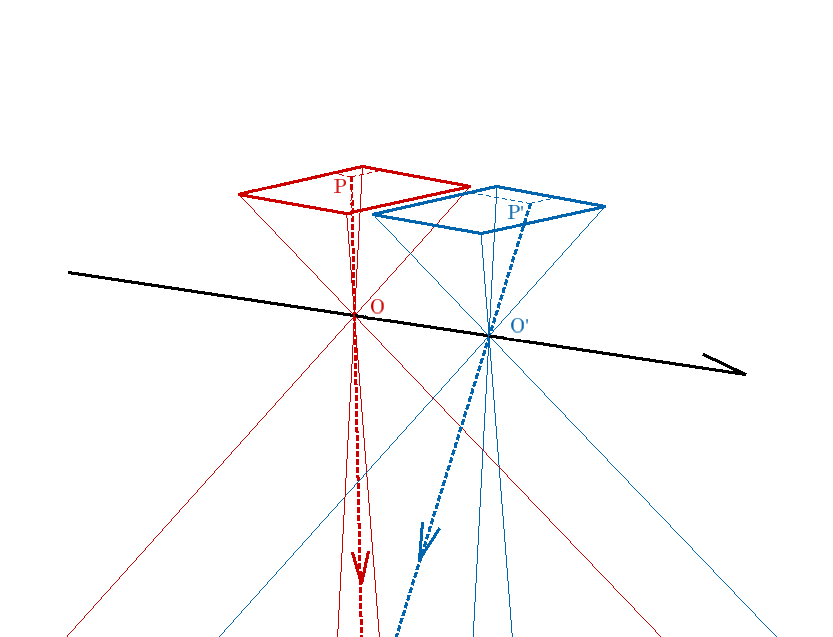
O,O’はレンズ中心、P,P’はそれぞれのフィルム上で建物の角が写っている点
です。どちらも航空カメラ内のとある点ですから、航空カメラがいつどこでどんな姿勢で存在していたかにかかわらず、Pがフィルム上でどの画素にあたるか=左から何ピクセル目で右から何ピクセル目かさえわかればOとP(や、O’とP’)のカメラ内での相対的な位置関係を確定し、OからPに向かうベクトルpを地理座標(緯度、経度、標高)と同じ単位を使用してあらわすことができます。あくまでカメラ内での相対的なもので、OやPの実際の緯度、経度、標高は蚊帳の外です。
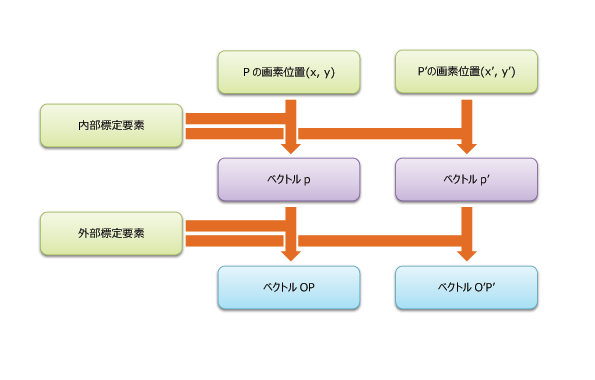
この時、Pの画素位置(x, y)と併せてベクトルpの導出に使うものにカメラの焦点距離やフィルムのサイズ、画素のサイズなどがあるのですが、これらをまとめて内部標定要素と呼びます。
…
ちょっと戻って、
OとPのカメラ内での相対的な位置関係を確定しOからPに向かうベクトルpを地理座標(緯度、経度、標高)と同じ単位を使用してあらわすことができます。
んーなんともむず痒い表現ですね。これ、なにが痒みのもとかというと、ベクトルpは単位は地理座標(緯度、経度、標高)と同じでもその座標軸が地理座標とは別物になるとうい点です。そして、これを解消するために使用するのが前回も出たGPS/IMUで計測するOの座標と姿勢で、こちらは外部標定要素と呼びます。これを使用すると、カメラ内での相対的なものでない、2つ目の図のイメージのままのベクトルOPをベクトルpから求めることができます。
…
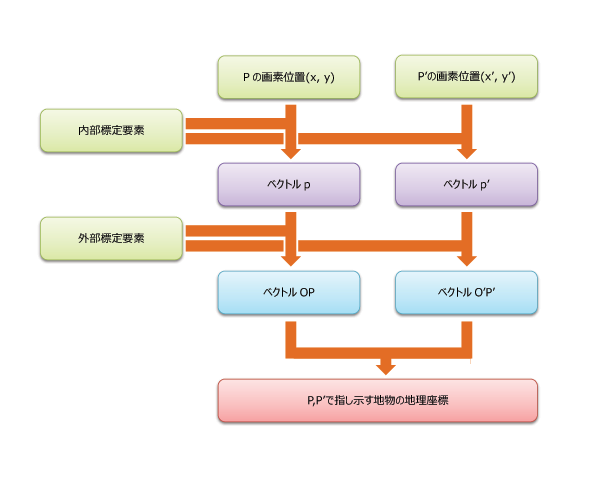
というわけで纏めると、ユーザーがメスマークで指示した建物の角の点に対して、
上図の流れで必要な値を求めて、最後に直線OPと直線O’P’の交点として地理座標を導きます。
…
さて、第3回からここまで、できるだけ難しい用語や専門用語を使うのは避けて写真測量の3次元座標計測の仕組みについて紹介してきましたが、如何でしたか?「あれ、オレこれ作れるんじゃね?」と気軽に計測プログラムを書いてみるきっかけになれば幸いです。
—
(おまけ)
参考までに、最後の図を最後まで。ベクトルp(p’)はカメラ座標系、ベクトルOP(O’P’)は地理座標系です。