
ずいぶん間が空いてしまいました。久しぶりに【写真測量夜話】の続きです。
前回、前々回と写真画像と地図の対応づけについてお届けしましたが、実は「地図」という言葉がこのシリーズで出現したのはこの2回が初めてでした。それがどうしたというと、
-
画像左上(画像座標(0,0)) ⇔ 地理座標(123.45, 234.56)
という感じで、この2回の内容からは、第6回までは出てきていた”標高”がすっぽりと抜け落ちています。今日は標高にも再び登場してもらい、「写真と座標(緯度・経度・標高)の対応づけ」で重要な「外部標定要素」について見ていきましょう。
…
外部標定要素、第6回で言葉としては出てきています。
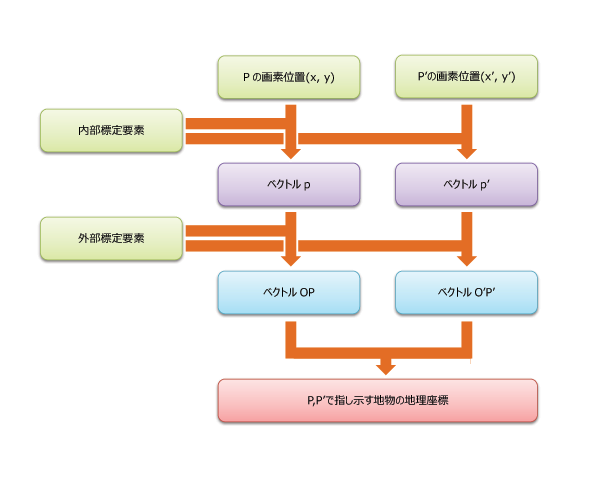
航空写真を撮影したときのカメラの座標と姿勢で、上の図のように航空写真の画素位置から地理座標(この場合は緯度・経度・標高)の変換に使用しますし、もちろん逆に地理座標から航空写真の該当画素位置を求めるのにも使用します。
…
さて、それでは具体的な外部標定要素の中身です。航空写真1枚について、基本的に以下の6つのパラメーターで構成されています。
- easting : 航空写真を撮影したときのカメラの経度(※1)
- northing : 航空写真を撮影したときのカメラの緯度(※1)
- height : 航空写真を撮影したときのカメラの標高
- omega : 航空写真を撮影したときの傾き(ローリング)
- phi : 航空写真を撮影したときの傾き(ピッチング)
- kappa : 航空写真を撮影したときの傾き(ヨーイング)
緯度・経度・標高はカメラの3次元座標値ということでわかりやすいかと思います。後半の傾きについては分かりにくいですが、
- omega(ローリング)⇒航空機の翼の先っぽが上下に振れる傾き
- phi(ピッチング)⇒航空機の機首が上下に振れる傾き
- kappa(ヨーイング)⇒航空機の機首が向いている方角
と思ってください。もちろん、どんな飛行機でも完全に一定の姿勢で飛ぶことはできないので、omega、phi、kappaは写真ごとに微妙に変化します。
冒頭の図は2枚の航空写真の画素位置1組から、1点の地理座標(緯度・経度・標高)を求める流れ図で、内部標定要素に加え航空写真2枚分の外部標定要素=12個のパラメーターを利用して(x, y, x’, y’) → (X, Y, Z)の変換を行っていることになります。また、逆向きの変換では (X, Y, Z) → (x, y)、 (X, Y, Z) → (x’, y’)とそれぞれ対応する航空写真の外部標定要素(6個のパラメーター)を使用します。
…
このように、外部標定要素は航空写真の画素位置と地理座標(緯度・経度・標高)を画素位置→地理座標の場合は12個、地理座標→画素位置の場合は6個のパラメーターで対応づけるのですが、ここまで来ると、具体的に変換式を眺めたくなりますよね。なりましょう。
この変換式、共線条件式と呼び写真測量で最も重要な式の一つです。概念図共々そらで描けるようになっていて損はないので、是非覚えてしまいましょう!というところで、続きはまた今度。
—
※1 例によって、実際は大抵平面直角座標を使用します。